Image:
 Author: Little Group: Default Filesize: 11.67 kB Date added: 2022-06-21 Rating: 5 Downloads: 1273 Views: 263 Comments: 2 Ratings: 1 Times favored: 0 Made with: Algodoo v2.1.0 Tags:
|
So, a while back, I made a prototype hovering car.
It was nothing special. It used lasers and reflection to detect whether or not it is close to a surface.
Obviously this was incredibly flawed. For one, a non-reflective surface could scramble the whole mechanism and render it unusable, and a platform made of lasers could shoot it up into space.
So, today I made a second prototype.
--Controls--
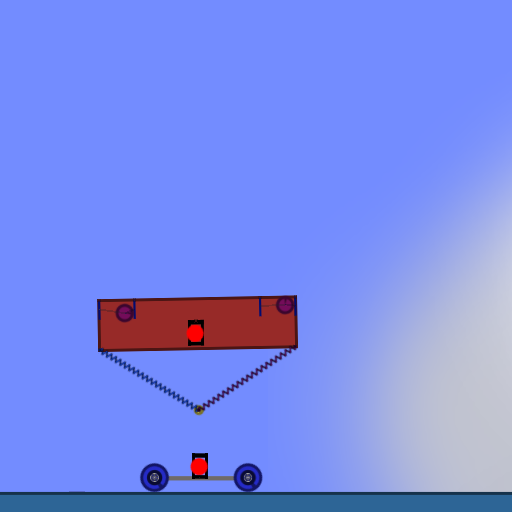
There is an insanely basic course made out of rectangles here.
These are a test to the controls.
To go up, press W. Note that the "car" will only go up to a certain altitude. This is to help with velocity smoothing.
To go down, press S. At the minimum, it will hover about a meter off of the ground.
And, A and D go left and right respectively.
--How it works--
The lasers are very similar to 0 constant springs. They use entityByGeomID to transmit data to the flight computers (represented as the green "wheels".)
The lasers are slightly angled so it will ease on and off of sharp surfaces, and you can see this in effect while climbing over the rectangles.
The lasers were programmed to only detect hits once per frame (so reflections don't do anything) and to report their fade distance (maximum length) when they detect nothing (out of range).
The wheels calculate everything and create a 2 object array which the thrusters detect. Since thrusters can accept negative values, this saves me a lot of laggy calculations. Thanks, whoever left that bug in!
One massive improvement over the last prototype is that damping is used inside of the thrusters - It's like a drone in that regard.
The last one used direct velocity modification which is not only unrealistic but also very janky, and the direct thrust also made it lurch like an elevator times ten.
This one's a lot smoother than that. |